
mako_hero_7
Paola Bigi e Silvia Forlucci, infermiere presso la sala operatoria dell’ospedale di Sansepolcro si sono rivolte a Nurse24.it per descriverci la loro importante esperienza discussa inoltre lo scorso 14 Novembre 2015 presso l’Auditorium S. Apollonia di Firenze nella relazione dal titolo: “L’innovazione in chirurgia: la robotica ortopedica in Valtiberina”.
FIRENZE. In un panorama assistenziale in cui si parla tanto di competenze avanzate, non potevamo non apprezzare l’esperienza del personale infermieristico del blocco operatorio dell’Ospedale di Sansepolcro con la chirurgia robotica ortopedica.
Paola Bigi e Silvia Forlucci, infermiere presso la sala operatoria dell’ospedale di Sansepolcro si sono rivolte a Nurse24.it per descriverci la loro importante esperienza discussa inoltre lo scorso 14 Novembre 2015 presso l’Auditorium S. Apollonia di Firenze nella relazione dal titolo: “L’innovazione in chirurgia: la robotica ortopedica in Valtiberina”.

Infermieristica e robotica, in Toscana si è avanti anni luce rispetto ad altre realtà italiane grazie ad una equipe dell'Ospedale di San Sepolcro.
L’ospedale di Sansepolcro è la prima struttura pubblica in Toscana e seconda in Italia (dopo Modena), ad aver adottato il sistema Rio Mako per la chirurgia robotica ortopedica grazie all’impegno dei direttori delle unità operative di Ortopedia di Arezzo dr. Caldora e del Valdarno dr. Ciampalini.
Nell’ambito della riorganizzazione del sistema sanitario regionale toscano sono stati attivati dei processi di valorizzazione delle specificità di alcune strutture ospedaliere al fine di utilizzarne al meglio le risorse. Ciò è stato reso possibile concentrando all’interno di tali strutture, alcune specifiche procedure, come nel caso di Sansepolcro, ma pur sempre garantendo al paziente prestazioni sanitarie di qualità ed in completa sicurezza.
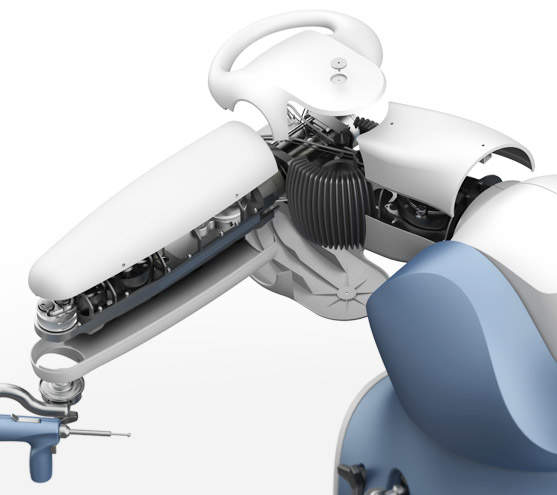
La piattaforma robotica Rio Mako, oggetto dello studio pilota dell’azienda Usl 8, è stata ideata per la protesizzazione delle grandi articolazioni. Attualmente viene utilizzata per protesi d’anca e protesi di ginocchio monocompartimentale, bimonocompartimentale, bicompartimentale e femoro-rotulea. Alla fine dello studio pilota CORA, peraltro tutt’ora in corso presso l’ospedale della Valtiberina toscana, l’azienda sarà in grado di fornire un importante report di hta rispetto all’introduzione di una tecnologia sanitaria fortemente innovativa come quella in oggetto.
L’obiettivo principale dell’hta è quello di individuare trattamenti ed interventi che portino il maggior beneficio al paziente, sulla base delle migliori evidenze scientifiche, rispetto al funzionamento della tecnologia, al suo impatto sociale, al suo impatto economico rispetto soprattutto a metodi tradizionali gia’ consolidati.
Il raggiungimento di obiettivi di efficacia nell’implementazione di nuove tecnologie sanitarie deve passare necessariamente attraverso studi di health technology assessment con valutazioni costo-efficacia, ossia effettuando una analisi delle ripercussioni sulla spesa sanitaria della tecnologia in questione.
Lo studio CORA nasce con l’obiettivo di evidenziare i vantaggi evidenti (o gli eventuali svantaggi) sia per il paziente che per la struttura ospedaliera erogatrice del trattamento sanitario. La fondamentale differenza derivante dall’utilizzo di Rio Mako risiede infatti nel conseguimento di livelli di precisione e riproducibilita’ impensabili (ed anche impossibili) da raggiungere con le tradizionali tecniche protesiche.
Al fine provare tali benefici, ed anche in un’ottica economica, è stata realizzata una valutazione delle principali categorie di costo afferenti all’utilizzo della piattaforma robotica Rio Mako ed un confronto di queste con i costi generalmente sostenuti per l’esecuzione del medesimo intervento con le tradizionali metodologie chirurgiche, ossia senza l’ausilio del robot.
La tecnologia robotica Rio Mako permette di rispondere ad una serie di bisogni di pazienti, chirurghi e strutture ospedaliere, identificabili come i tre principali player coinvolti nel settore dell’ortopedia.
Studi sui dati clinici hanno mostrato chiaramente i benefici ottenuti, tra cui: maggiore accuratezza, minore variabilita’ e maggiore standardizzazione nell’esecuzione dell’intervento, ridotte tempistiche di recupero della mobilita’ post-operatoria, minore invasività. Questi benefici per il paziente si traducono in vantaggi di costo e di utilizzo di risorse per l’azienda con minori costi per i programmi di riabilitazione post operatori, minori quantita’ di interventi protesici totali, piu’ costosi sia in termini di operazione sia di trattamenti pre e post operatori.
Prima dell’implementazione dello studio pilota, peraltro tutt’ora in corso presso l’azienda Usl 8, è stato effettuato il controllo delle sale operatorie nel rispetto della specifica normativa per quanto riguarda gli aspetti tecnologico-strutturali (nei quali vengono definiti dettagliatamente gli spazi dedicati), la dotazione strumentale, la filtrazione dell’aria e i sistemi di sicurezza sia per le persone assistite che per gli operatori.
Il percorso organizzativo ha previsto la creazione di un team di strumentisti già esperti di ortopedia dedicato esclusivamente alla chirurgia ortopedica robot assistita previo corso di formazione sul campo tenuto dai bioingegneri della ditta di riferimento. Lo stesso corso di formazione è stato esteso poi a tutti gli operatori, sia infermieri che figure di supporto, con dimostrazioni pratiche sia sul corretto funzionamento che sulla manutenzione della piattaforma robotica. Gli interventi effettuati sull’organizzazione si sono concretizzati quindi nell’organizzazione delle risorse umane, delle risorse materiali ed immateriali (e quindi know how, competenze, esperienze degli operatori professionali).
Scopo: il coordinamento dei processi clinici assistenziali ed una integrazione dei “saperi” e delle abilità di tutti gli operatori con l’obiettivo di ottimizzare le risorse in termini di efficacia e di efficienza.
L’essere una struttura di piccole dimensioni e ben organizzata, ha costituito un fattore di successo che ha permesso l’inserimento di questa tecnologia con una gestione più semplice di tutte le risorse disponibili. La curva di apprendimento è stata notevolmente facilitata dall’esperienza ultradecennale di quasi tutti i professionisti del blocco operatorio.
Un aspetto essenziale per la piena realizzazione di questo tipo di organizzazione (e che è alla base di ciascuna struttura sanitaria) è che vi sia la presenza di una equipe professionale e multidisciplinare che, come unico scopo, ha il completo benessere del paziente dal punto di vista della qualità e della sicurezza della prestazione. Ci sono stati due incontri con dimostrazioni pratiche sullo strumentario specifico e sul funzionamento e manutenzione di tutte le componenti della piattaforma robotica. In tutto il percorso chirurgico del paziente e, soprattutto, all’interno di un blocco operatorio, le attivita’ si integrano e tutti, ognuno con la propria specificità di azione, concorrono alla corretta gestione del processo.
Un fattore critico del percorso organizzativo è il fattore tempo. Tutto il percorso del paziente che deve essere sottoposto ad intervento chirurgico è scandito dal tempo e quindi il tempo di attesa per il ricovero, il tempo per espletare le attivita’ di preparazione all’intervento, il tempo del periodo perioperatorio (e quindi la programmazione delle sedute operatorie, i tempi di sala operatoria).
In questo senso la variabile tempo deve essere considerata come una risorsa a nostra disposizione da utilizzare per migliorare l’efficienza organizzativa, la produttività e la qualità del processo chirurgico.
Il time management non consiste nel fare il più possibile in un tempo definito, ma nel fare le cose che consentano il raggiungimento dell’obiettivo facendo fluire il lavoro.
Vari fattori critici, sia di successo che di insuccesso, hanno condizionato e condizionano tutt’ora lo studio sperimentale CORA , ma ciò nonostante i risultati conseguiti finora sono particolarmente incoraggianti.
Il sistema robotico RIO, il cui acronimo è robotic-arm interactive orthopedic, è una piattaforma robotica ad alta tecnologia, utilizzata per la chirurgia protesica in ortopedia.
Questa piattaforma deriva da sistemi di navigazione guidata intra-articolare già sperimentati negli anni 80. Si compone di un braccio robotico, di un modulo di visione con telecamera ad infrarossi e di un modulo guida dal quale viene gestito il software di pianificazione e simulazione dinamica tridimensionale dell'intervento e di valutazione intra-operatoria.
Il modello 3d, su base tomografica, riproduce fedelmente tutte le caratteristiche anatomiche del paziente. Questo consente un dettagliato planning pre-operatorio e una valutazione dinamica intraoperatoria.
Per l’intervento di protesi monocompartimentale di ginocchio è possibile valutare il bilanciamento legamentoso, lo spessore cartilagineo e la flesso-estensione dell’articolazione.
Per l'intervento di protesi di anca, la pianificazione permette di stabilire la lunghezza e l'offset dell'arto da operare, basandosi sull'arto sano controlaterale.
Nella protesi di anca si va a visualizzare la linea di resezione sul collo femorale, riducendo il rischio di mandare la protesi in varo o in valgo.
Cio’ consente di pianificare la fresatura del cotile senza rischiare di sfondare la lamina quadrilatera, con una accuratezza che riduce il margine di errore ad un massimo di 1 millimetro.
Inoltre si puo ristabilire il centro di rotazione originario.
Per entrambe le protesi si possono determinare le dimensioni ottimali degli impianti, l'allineamento più idoneo e le aree dell'osso che dovranno essere rimosse. Inoltre si ha la possibilità di modificare uno o più elementi grazie alla valutazione intra-operatoria.
La preparazione del braccio robotico inizia con la copertura sterile di questo: tutta la preparazione del robot, dello strumentario specifico, degli accessori operativi e della calibrazione del braccio è ad intero appannaggio dell'infermiere strumentista, in collaborazione con l'ingegnere biomedico, figura fondamentale, che presenzia tutta la seduta operatoria.
Al braccio robotico si integrano gli accessori operativi, diversi secondo la tipologia di intervento.
Una volta assemblate accuratamente tutte queste componenti, l'infermiere provvede a sigillare ogni singola vite, per evitare che avvenga contaminazione in termini di sterilità, ma anche infiltrazioni di liquidi organici all'interno del braccio robotico.
Per la protesi di anca viene prima installata la fresa, montata nel suo relativo manipolo, con la giusta inclinazione, con la quale viene alesato il cotile.
In seguito questo manipolo viene sostituito con il battitore per la componente acetabolare definitiva;
Il braccio robotico pone la fresa prima, e il battitore poi, all'interno di una gabbia virtuale, che indirizza l'inclinazione e la versione pre pianificata.
Al momento dell'impianto definitivo della componente acetabolare, è possibile valutare millimetricamente l'avvenuto contatto della protesi con il cotile. La preparazione dello stelo femorale viene invece eseguita con tecnica navigata tradizionale.
Nella protesi di ginocchio, l'accessorio operativo è unico; al manipolo viene integrata una fresa ed un sistema di irrigazione continua. Questa sarà usata per la scolpitura della nicchia femorale e tibiale ove verranno impiantate le relative componenti.
Dopo la preparazione dello strumentario base e specifico, dopo la copertura sterile del robot, lo strumentista provvede a calibrare il braccio robotico. La calibrazione è un passaggio fondamentale per ottenere la massima accuratezza durante tutte le fasi dell'intervento; al braccio robotico vengono fatti compiere dei movimenti pilotati multidirezionali, per evidenziare anticipatamente qualsiasi tipo di disfunzione. Questa manovra viene eseguita prima di ogni seduta operatoria e ripetuta, qualora il sistema robotico debba essere spento e riavviato.
Affiche’ possa avvenire la triangolazione dinamica tra paziente, telecamera e braccio robotico, il chirurgo impianta nella superficie ossea degli speciali supporti metallici, denominati array, dove lo strumentista ha preliminarmente assemblato i visadisc, che altro non sono che dei piccoli dischi dotati di una superficie che viene captata dalla telecamera. Questa, a sua volta, rimanda il segnale di localizzazione al braccio robotico. Il corretto assemblaggio dei visadisc è determinante per poter fornire millimetricamente la garanzia di accuratezza.
Un errato assemblaggio di queste componenti, da parte dello strumentista, può andare ad inficiare il buon esito dell'intervento.
Il materiale monouso sterile, fornito dalla ditta di riferimento, è composto dal telo di copertura prima descritto, check point che vengono impiantati in sede pelvica, femorale e tibiale, a seconda del tipo di intervento; le fiches sulle quali vengono montati gli array, dotati di visadisc.
Sempre monouso è la fresa che viene utilizzata per l'intervento al ginocchio, completa di clip e tubo d'irrigazione.
L'equipe infermieristica ha aderito con estrema competenza ed entusiasmo al progetto, fin dal momento della sua presentazione.
Entusiasmo dovuto all'opportunità di incrementare le proprie competenze professionali in un settore così esclusivo ed innovativo, quale la chirurgia robotica.
Il training on the job, supervisionato dall'ingegnere biomedico, ha permesso, in tempi brevi, l'inizio del progetto con 2 interventi per seduta operatoria, passati a 3 dopo poco tempo, superando oramai i 130 casi.
Per quanto concerne la parte dello strumentista, il vantaggio di questa tecnica innovativa è comune a quello dei chirurghi: la pianificazione pre-operatoria consente anche all'infermiere di predisporre lo strumentario specifico e gli impianti di prova della misura prescelta, senza che essi siano soggetti a variazioni suscettibili. Viene quindi eliminata tutta la parte della manipolazione delle varie maschere di taglio o delle frese di varie misure, con riduzione del rischio infettivo.
La riproducibilità di questi interventi si è tradotta anche a livello infermieristico, in un duplice vantaggio, in termini di apprendimento e di esecuzione della tecnica.
Il piccolo gruppo di strumentisti di ortopedia, avvalendosi della solida formazione delle tecniche chirurgiche tradizionali e della personale esperienza, ha potuto collaborare senza problemi ai casi che in corso d'opera hanno presentato complicanze o variazioni di tecnica, per fortuna rarissimi.
di Paola Bigi e Silvia Forlucci
















Commento (0)
Devi fare il login per lasciare un commento. Non sei iscritto ?